信号与系统笔记(七):Z变换 |
您所在的位置:网站首页 › nx^n收敛域 › 信号与系统笔记(七):Z变换 |
信号与系统笔记(七):Z变换
|
接笔记(五)拉普拉斯变换,本章讲Z变换,即拉普拉斯变换的离散时间情况。 Z变换在第三章傅里叶级数中我们推导了复指数信号是线性时不变系统的特征函数,在拉普拉斯变换中是连续时间情况,这里要从离散时间的情况讨论。 y[n]=H(z)z^n\\ H(z)\sum^{+\infty}_{n=-\infty}h[n]z^{-n}\\ H(z) 为单位脉冲响应 h[n] 的Z变换,当输入函数为离散时间信号 x[n] 时,Z变换被定义为X(z)=\sum^{+\infty}_{n=-\infty}x[n]z^{-n}\\其中 z=e^{s},s=\sigma+j\omega ,为复指数,在复平面上的轨迹是个单位圆,但中心点并不一定在原点。为了保证在原点,转化为极坐标的形式(相量法) z=re^{j\omega} 。 将 z=re^{j\omega} 代入Z变换公式X(z)=X(re^{j\omega})=\sum^{+\infty}_{n=-\infty}x[n](re^{j\omega})^{-n}\\ X(re^{j\omega})=\sum^{+\infty}_{n=-\infty}\{x[n]r^{-n}\}e^{-j\omega n}\\ 当 r=1 时,变为 X(e^{j\omega}) ,即离散时间傅里叶变换(DTFT)的形式。回忆一下拉普拉斯变换, s=j\omega 时退化为傅里叶变换 X(j\omega) ,在离散的情况下是 z=e^{j\omega} 。 s 域中的 j\omega 轴就对应了 z 域中的单位圆,剩余的性质也对应相似。 注意 r 指示半径, \omega 指示角度  收敛域(ROC) 收敛域(ROC)z域上的收敛域一般都是通过等比数列求和公式来计算,请务必记住等比数列求和公式。 例:序列 x[n]=a^nu[n] ,求其z变换及其收敛域 X(z)=\sum^{+\infty}_{-\infty}a^nu[n]z^{-n}=\sum^{+\infty}_{0}(az^{-1})^n\\ 如同傅里叶变换、拉普拉斯变换一样,需要满足绝对可积的条件,那离散的情况就是绝对可和,也就是 \sum^{+\infty}_{0}(az^{-1})^n|a| 。 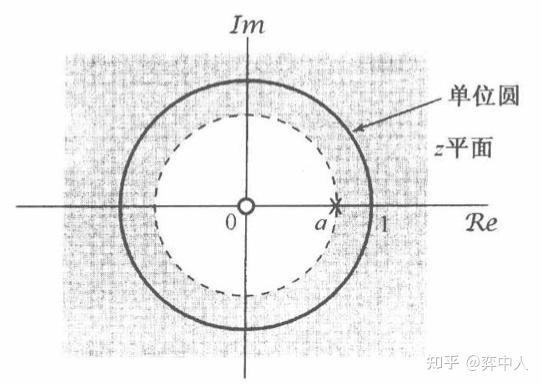 这是向外收敛的情况,那同样还有向内收敛的情况。 如同拉普拉斯变换一样, u[n] 向外,则 u[-n-1] 向内, u[-n-1] 的原因是从 -1 开始, u[n] 从0开始,保证不重合。 z变换的信号表达一般是 a^nu[n]-b^nu[n] 这种的。主要是为了框收敛域和等比数列。 例: x[n]=7(\frac{1}{3})^nu[n]-6(\frac{1}{2})^nu[n] 得到 7\sum^{\infty}_{n=0}(\frac{1}{3}z^{-1})^n-6\sum^{\infty}_{n=0}(\frac{1}{2}z^{-1})^n\\ =\frac{7}{1-\frac{1}{3}z^{-1}}-\frac{6}{1-\frac{1}{2}z^{-1}}=\frac{z(z-\frac{3}{2})}{(z-\frac{1}{3})(z-\frac{1}{2})} 收敛域取两者之间的较大值 |z|>\frac{1}{2} 收敛域的性质1. X(z) 的收敛域是在z平面内以原点为中心的圆环。 到达不了原点,也就意味着绝对可和,在原点处是积到无穷的,如果到原点也就是z=0,则r=0,r在分母上,趋近于0则整体趋于无穷,不符合狄利克雷条件。2.收敛域内不包含任何极点。 与拉普拉斯变换一样,在极点处 X(z) 无穷大,不收敛。3.如果 x[n] 是有限长序列,那么收敛域就是整个z平面,可能除去 z=0 或 z=\infty 。 与拉普拉斯变换一样,总共只有这么多,这些加起来就已经收敛了,再加一堆0,还是收敛。4.如果 x[n] 是一个右边序列,并且 |z|=r_0 的圆位于收敛域内,那么 |z|>r_0 的全部有限 z 值都一定在这个收敛域内。 右边序列,意味着方向指示函数为 u[n]5.如果 x[n] 是一个左边序列,并且 |z|=r_0 的圆位于收敛域内,那么 0z逆变换 还是和拉普拉斯变换很类似,公式是复变函数围道积分,但常用的是利用部分分式分解法。 z逆变换:x[n]=\frac{1}{2\pi j}\oint X(z)z^{n-1}dz\\ 部分分式分解法例: X(z)=\frac{3-\frac{5}{6}z^{-1}}{(1-\frac{1}{4}z^{-1})(1-\frac{1}{3}z^{-1})},\quad |z|>\frac{1}{3}\\ 先将其部分分式分解 X(z)=\frac{1}{1-\frac{1}{4}z^{-1}}+\frac{2}{1-\frac{1}{3}z^{-1}}\\ 注意到这里分母需要是1-()的形状,括号内为系数乘以 z^{-1} ,其实还是要为了满足等比数列公式里的分母是 1-q 的形式。当然计算的过程中也可以先分子分母同乘 z 方便书写,全凭个人喜好。 于是分解出的两个式子通过系数和收敛域的指示进行还原。 x_1[n]\leftrightarrow \frac{1}{1-\frac{1}{4}z^{-1}} \quad |z|>\frac{1}{4}\\ x_2[n]\leftrightarrow \frac{2}{1-\frac{1}{3}z^{-1}} \quad |z|>\frac{1}{3}\\ 得到 x[n]=(\frac{1}{4})^nu[n]+2(\frac{1}{3})^nu[n]\\ 于是这个函数的z逆变换完成。 假如收敛域是 \frac{1}{3}|a|\\ 将其转化为泰勒级数 X(z)=\sum^{\infty}_{n=1}\frac{(-1)^{n+1}a^nz^{-n}}{n}\\ 根据z变换原式的结构,直接就可以得到 x[n]=(-1)^{n+1}\frac{a^n}{n} \quad n\ge1\\ z变换的性质1.线性 ax_1[n]+bx_2[n]\leftrightarrow aX_1[z]+bX_2[z] \quad ROC=R_1 \cap R_2\\ 2.时移 x[n-n_0]\leftrightarrow z^{-n_0}X(z) \quad ROC=R\\ 3.尺度变换 z_0^nx[n]\leftrightarrow X(\frac{z}{z_0})\quad ROC=|z_0|R\\ 4.时间反转 x[-n]=X(\frac{1}{z}) \quad ROC=\frac{1}{R}\\ 5.时间扩展 x[\frac{n}{k}]\leftrightarrow X(z^k) \quad ROC=R^{\frac{1}{k}},n是k的倍数\\ 6.卷积 x_1[n]*x_2[n]\leftrightarrow X_1(z)X_2(z) \quad ROC=R_1\cap R_2\\ 7.z域微分 nx[n]\leftrightarrow -z\frac{dX(z)}{dz} \quad ROC=R\\ 有时候可以利用微分性质把非有理z变换转换为一个有理函数的表达式再做逆变换。 还是这个式子 X(z)=log(1+az^{-1}) \quad |z|>|a|\\ 先对其进行z域微分,得到 nx[n]\leftrightarrow -z\frac{dX(z)}{dz}=\frac{az^{-1}}{1+az^{-1}}\\ 分子上的 z^{-1} 可以利用时移性质,剩下的 \frac{a}{1+az^{-1}} 先做一次z逆变换得到 a(-a)^nu[n]\leftrightarrow\frac{a}{1+az^{-1}}\\ 时移之后 a(-a)^nu[n-1]\leftrightarrow\frac{az^{-1}}{1+az^{-1}}\\ 得到与幂级数展开法一样的式子,即z逆变换完成。 8.初值定理 x[0]=lim_{z\rightarrow \infty}X(z)\\ 通常用于检验z变换计算中的正确性 附上奥本海姆上的两张小结图  常用z变换对  z域系统的稳定性 z域系统的稳定性当且仅当系统函数 H(z) 的收敛域包括单位圆 |z|=1 时该系统是稳定的,即存在傅里叶变换。 有理系统函数的因果线性时不变系统是当且仅当系统函数 H(z) 的全部极点的模均小于1时,是稳定的。也就是说都在单位圆内。其实本质上也是要为了存在傅里叶变换,因为极点全在单位圆内的时候,收敛域就可以从圆内出发向内或向外。 z域系统框图主要是看系统框图写系统函数,和给系统函数画系统框图。 例:若一系统函数为 H(z)=\frac{1-2z^{-1}}{1-\frac{1}{4}z^{-1}}\\ 我们知道系统有直接法,级联法,并联法三种方法。级联法是最简单的,即原式化成 H(z)=\frac{1}{1-\frac{1}{4}z^{-1}}(1-2z^{-1})\\ 左边部分为反馈,右边部分直接通向终点。则框图可画成  中间两个延时单元可以合并成一个  如果只给系统框图,怎么写系统函数。还是这张图。 还是老规矩,看节点的入口(基尔霍夫电流定律的思想) 首先看左边+号节点,左边节点函数(设为 Q(z) )。进入的分量为 X[z] 加上 Q[z] 经过 z^{-1} 再经过 1/4 , Q(z)=X[z]+\frac{1}{4}z^{-1}Q(z) ,化简成 Q(z)=\frac{1}{(1-\frac{1}{4}z^{-1})}X(z)\\ 此时 \frac{1}{4} 的那条线断开,合并成新的电路。 下一个节点为图中 Y(z) 左边的+号节点,进入的分量是 Q(z)\frac{1}{(1-\frac{1}{4}z^{-1})}X(z) ,再经过一个 z^{-1} 的时移,再乘以 -2 ,得到最终结果 H(z)=\frac{1}{1-\frac{1}{4}z^{-1}}(1-2z^{-1})\\ 系统函数为H(z)=\frac{Y(z)}{X(z)}=\frac{1}{(1-\frac{1}{4}z^{-1})}(1-2z^{-1})\\ 和原函数相同。 |
【本文地址】
今日新闻 |
推荐新闻 |